

三维计算机断层扫描测量的测量不确定度的影响
三维计算机断层扫描测量的测量不确定度的影响
总结
在工业用的X射线Computeromografie(CT),组件的方向可以对测量有较大的影响。根据组件的方向变化,通过光束长度
U.A.影响部件后面的信号 - 噪声比的X射线强度。操作说明了如何,局部血液束的长度可确定的基础上最小化的几何模型的工件时,根据工件的方向上通过模拟。模拟梁长度比舞台上的气瓶与实验测量。特别是,取向组分的效果是散射测量过程中,在各个点和检测的特性。
关键词:X射线计算机断层扫描,通过梁的长度,单点散射测量过程中,校正工件,加强气缸,仿真,测量的不确定性
1三维测量,使用工业用X射线计算机断层扫描
工业X射线计算机断层扫描(CT)是一种多用途的非破坏性检测DAR,除其他事项外,CT可以用来作为一个世界的三维测量方法。播放射流长度累计沿光束路径上一个重要的角色。对于一个需要的初始强度根据朗伯 - 比尔定律,通过光束长度成倍。另一方面更多束硬化和散射文物降低图像质量与梁的长度增加是可以预期的。这也有导致的信号对噪声比降低。通过本地梁的长度的变化与每个角度取得的投影图像的位置,在该位置。此外,由当地梁的长度随方向的组件。这是可取的,对于一个给定的部分由最大梁的长度尽可能小,以保持。因此,其目的是可以预期的Tomografierung部件的方向,从而改善三维CT测量的最小的最大流射流长度确定先验。这是起点的工件几何模型。
2由梁的长度,根据定向组件
2.1模拟照射
对于梁长度的决心,通过与艺术家联邦材料测试研究所仿真软件[1]第一个模拟的几何结构与锥形束CT系统。用MATLAB进行仿真。该管的直线(图1,左)建模为一个点源和单一的X-射线。 X射线束被布置在一个正方形晶格。所示为常规的检波器的平面表面。 CT系统的一个重要特征是球管和探测器之间的距离(源检测器距离的SDD)。 CT坐标系上的点源和探测器的中心(x轴)和检测器的方向(y方向沿着宽度检测器和检测器沿z方向的高度)之间的连接线形成。
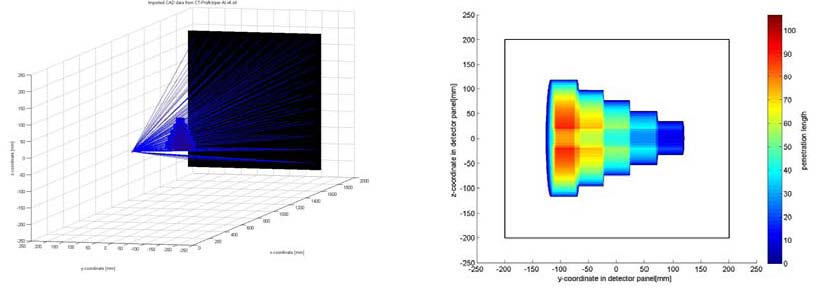
图1:模拟放射线阶段的铝筒(左)和彩色编码表示的空间分辨的束长度,旋转角度0°和90°的倾角(右)。
在这种结构中,工件的几何模型的定位。为STL文件导入几何模型表面模型和可视化。 STL格式是一种广泛使用的简单的数据结构的标准化的CAD界面。虽然STL格式的水平精确映射,使用近似三角形曲面。近似取决于使用的CAD软件。它往往可以从CAD模型(例如71微米的铝步骤滚筒1064三角形)的最大允许偏差。这是比(最大直径为90毫米)的尺寸小,所以没有其他重要的决定预期在梁的长度的基础上调整参数的最优值的近似值。几何模型的中心位置相对于转台的中心。但它也可以是模拟的偏心设置。 x位置的转盘(源对象距离SOD)计算点云的STL数据集的倍率M(M = SDD / SOD)最大化。为了这个目的,点云被设置为边界框,使得所有的点是内盒。空间对角线上给出的最大长度的边界框。在空间的对角,球将被描述,这是只要移入锥形束的点源和球接触的锥形表面的方向。这确保了转动板构件和所有方向的角度位置的装置完全可以在检测器上成像。有关的计算,提供一个安全系数。这要考虑到的实分量可以略大于几何模型的制造偏差所造成的实分量手动定位,因此可能会从理想中心的定位不同。
2.1梁长度的计算
通过梁的长度,对应于在材料的X射线的路径,光线的交点计算与三角表面和相邻的入口和出口点之间的部分的长度积累。所有定义的组件方向和旋转工作台的角度位置θ我为每个光束的光束长度,确定φ。通过本地光束的长度,然后可以可视化的颜色编码(图1右)。为了有足够精确的计算梁的长度,数量足够多的光线和角度的步骤是必需的。这需要高的计算工作量,从而使梁的长度的计算,需要使用数值高效的算法。用于此目的的射线追踪算法进行了比较由Löfstedt和Akenine默勒[2]。本条件下,该算法的奥罗克[3]已证明是最适合的。为了计算,使用的电脑与英特尔酷睿2双核处理器E8600,3.33 GHz的3.25 GB的RAM。含有较多数目的光线和更多的角增量增加的光束长度的准确度,而且还计算努力。这里是一个可以找到妥协。敏感性分析表明,经常一个网格,64×64的横梁和步骤5°旋转和倾斜角是足够的。有了进一步的增加不会导致长度计算出的光束通过一个显着增加。的倾斜角度,只需要在0°和90°之间变化,因为该组件是旋转。当0°到180°的旋转角度的旋转对称分量,就足够了。梁的长度的计算的程序在图2中示意性地示出。几何模型读取和生成边界框。然后,几何模型的位置放大优化。缺省情况下,开始角度为φ= 0°,θ= 0°,但它也可以被设置为任何值。在一个特定的方向和角度位置的给定组件的所有的光束,通过光束的长度指的是旋转角度之前,下一个是模拟的。是否所有的旋转角度模拟下一个组件的方向设置。计算过程中再次运行。
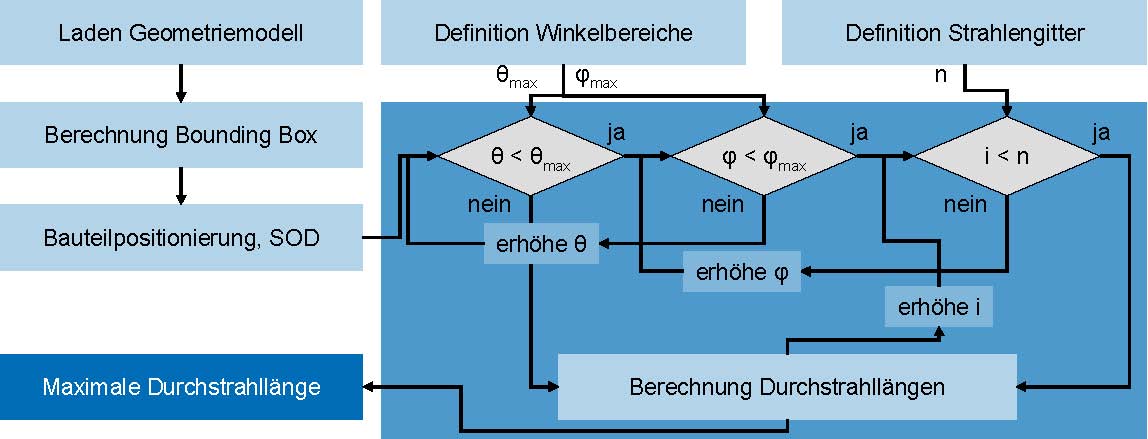
图2:梁的长度的计算的流程图。
通过这种方法,组件对齐,可以用最少的最大吞吐量束长度。如果这与组合(合金元素)成分的组合物比使用朗伯 - 比尔定律的减弱,预期减少初级电子束的强度可以进行估计。这可以证明是否具有现有的CT系统的一个组成部分,可以是tomografiert有用。另外,附上一主要依据确定公平的测量任务参数值的CT系统被创建。 [4]这适用于特定参数,这将影响到成像(如管电压,管电流和预过滤器),并且可以由操作员设置。
3实验结果
束长度的模拟与实验测量。为了这个目的,根据VDI / VDE 2630布拉特1.3的铝筒阶段[5],tomografiert在三个方向(0°,45°,90°),并测得的外径5。下面的参数值:225千伏管电压,管电流0.38毫安,2毫米Kupfervorfilter,曝光时间2000毫秒,720预测,同比增长2.97。这将导致在一个像素大小为135微米。这些变化记录在由卡尔·蔡司的电脑断层扫描断层METROTOM 1500进行测量的的CALYPSO测软件4.8。示于图3(左)测量所采用的策略。对于每一个气缸,一个测量点的间距为0.1毫米,以被定义的三个圆圈。如图所示,为清楚起见,只有一小部分的测量点。
梁的长度测量点的平均速率[毫米]
100 90 80 70 60 50 40 30 20 10 0
0 45 90
倾斜角[°]
筒1 0°45°旋转滚筒旋转滚筒1 90°旋转
筒5 0°45°旋转滚筒5旋转筒5旋转90°的
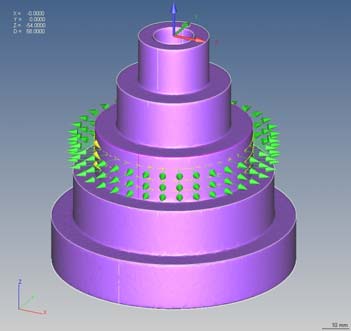
图3:测量策略(左)和模拟的平均光束长度的测量点作为一个函数的阶梯形气缸(右)的方向。
在图3中是对通过中间梁长度的三个旋转角度缸1和5,在这方面有所示的倾斜角的测量点。的倾斜角定义的台阶筒,转盘的旋转轴的中心轴线之间的角度。的倾斜角为0°,因此,在图3中对应的对应到右侧,而在90℃的中心线的旋转轴线正交。将会理解,缸体1,射流长度的倾斜角增加的变化的平均速率,而缸体5,会发生相反的效果。评估散射测量过程取决于组件对齐导向,面向特征点。这里的背景,特征值的计算方法调整理想的替代几何形状在许多个别点。较大的分散的个别点应引起更大的方差的特征值。在基于点的方法,计算每个测量点的坐标的散射测量3次。对于这一点,计算的标准偏差为每个坐标方向分成若干类。的类的数量来计算的测量点的数量的平方根。类可以是可视化的在直方图中(参见图4的例子中,左)。柱状图表示缸体5的测量点(直径90毫米)的x坐标的分布。所有已累积积分散射值低于95%,可以看作是该功能的推广价值。一般情况下,可以由其衍生的一个椭圆体,在每个坐标方向上的变化是显着的。
0035 00:04
12:03
95%的上限散射[毫米]
0025
00:02
0015
12:01
0005
0
0°x方向
0°y方向
45°x方向
45°的Y方向的
90°x方向
90°的Y方向的
频率累积%
图4:点扩展(铝筒5的x坐标)(左)和组件的方向的点扩散函数和公称直径(右)的直方图。
根据此功能可以退化椭球。在该协议中,电路的z坐标是精确定义的,所以,它并没有在测量模型中的表面扩散,而x和y坐标值以及偏差气缸。在平原,在xy平面上沿圆形轨道的精确点都记录在工件坐标系,使这一价差只有z坐标。作为一个功能组件的取向和公称直径的95%的色散值的变化,如图4所示,用鼠标右键。色散值增加为0° - 45°方向的公称直径,90°方向相反的趋势是观察。可以被视为由不同的光束长度的一个原因(参见图3右)。在0°位置的照射,而照射在90°方向的气缸体1中,只有小的壁厚为几个突起的台阶筒的总高度。传播的传播的特征值的点的比较,很明显,前者是高于3-5倍的特征散射,但也存在类似的趋势(参见图5,右)。
12:05
00:04
0045
0035
0时04分
传播[毫米]
0035
12:03
0025
00:02
0015
12:01
传播[毫米]
0025
0015
0005
0005
0 0
0°0°点散射特性散射
45°点扩散
0°0°点散射特性散射
点45°45°散射特性散射
点90°90°散射特性散射
45°90°色散特征点差90°散射功能
图5:点差(x)和功能扩散比较气缸直径(左)和比较点差(z)和特征散射面距离(右)。
使用最适合的方法计算,从各个点的特征值。最合适的是一个平均值,因为这两个点内外的适应几何谎言。所观察到的变化是随机的(相对量),这样它们不会传输到相应程度的特征值的传播。一个不同的行为观察到直径比在平面的距离。在这里,0°定位较高的分散在各个点已经显露出来。对于0°方向,上述圆筒形表面平行于旋转工作台或可用于所有的旋转角度的实体模型的xy平面。这可能会导致Feldkamp重建不确定性较高的算法。这可以推断出的,测量的喷射,因此,平行的表面tomografiert组件应稍微倾斜。
用知识的分散体在测量过程中,测量的不确定性可基于已校准工件的方法估计根据DIN EN ISO 15530-3 [6]。三维CT测量的第一个应用此方法是[7,8]。这种不确定性的校准过程,测量过程中的工件和未补偿的系统偏差考虑在内。应该指出的是,必须测量校准在策略上相似,在测量过程中,以确保可比性。 CT评价通常采用CAD到部分比较,因此不直接转移到触觉三坐标测量机。出于这个原因,对准的触觉坐标测量类似的协议已被使用。结果表明,较大的光束长度更大的分散性的测量过程(SD比重=向上),并且它还具有测量的不确定性。由先验模拟梁的长度和其链接到与材料相关的知识可以由削弱最便宜的组件的位置和方向的断层图,并从中获得预期的弱化表明CT系统的组成部分的适当的参数值。这可能三维CT的测量,能够提高通过减少测试过程中的传播。此外,新的组件Tomografierung可以更高效,因为测试运行的数量减少到找到特定任务的测量参数值。
致谢
工作的经费由德国研究基金会DFG德国巴西:合作BRAGECRIM(批准号:SCHM 1856/13-1)的框架内。
证书
[1] G.-R.的詹尼士,C.白龙,U.尤尔特:艺术家 - 分析RT检验仿真工具工业应用的第17届世界无损检测,2008。
[2] M.Löfstedt,T. Akenine穆勒:雷三角形相交算法评估框架。 J.图形工具10(2),第13-26页,2005年。
[3] J.奥罗克,计算几何C.第二版。 226-241页。波士顿:科学出版社,1998年。
[4] VDI / VDE 2630布拉特1.2,技术规则,2008-12,计算机断层扫描三维测量 - 计算机断层扫描三维测量的测量结果和建议的影响因素
[5] VDI / VDE 2617第13部分,VDI / VDE 2630布拉特1.3技术规则,2009-08,计算机断层扫描三维测量三坐标测量机与CT传感器的应用ISO 10360指南
[6] EN ISO 15530-3草案2009-07产品几何技术规范(GPS) - 坐标测量机(CMM)确定的不确定性的方法 - 第3部分:使用已校准工件或标准
[7] R·施密特,C. Niggemann,X-射线计算机断层扫描中测量不确定度校准件,2010箱尺寸。 SCI收录。技术21 054008日
[8] M. BARTSCHER U. HILPERT,D.菲德勒,决定的不确定性,例如计算机断层扫描测量气缸头,TM 75(3),第178-186页,2008年。
TAG:
