

精确的螺旋锥束重建精度测量不确定度评价及勘探
精确的螺旋锥束重建精度测量不确定度评价及勘探
1.1数据采集
利率在我们的评估研究的对象是一个立方体泰坦合金制造由FEINMESS GMBH&CO。KG。立方体有一个大小为101010立方毫米和25等距分布三面有一个半径为0.40.0008毫米的球形帽。已校准的长度和位置的上限由德国标定(DKD)使用触觉测量。
表1中。技术规格所用的CT扫描仪。
| CT scanner: v|tome|x s 225 | |||
|---|---|---|---|
| Manufacturer X-ray tube Max. tube voltage Max. output | Phoenix x-ray (GE Sensing & Inspection Technologies) Microfocus 225 kV 320 W | Detector Detector area Pixel number Pixel Pitch Dist. Source-Object Dist. Source-Detector | Perkin Elmer 840 204.8 204.8 mm² 512 512 400 µm 68.5492 mm 783.4191 mm |
我们从这个校准立方体收购已扫描由一个凤凰X-射线V |大部头| XS 225工业锥形束CT扫描仪在诺伊斯登Prüfzentrum。扫描仪的技术规格如表1所示。 V |大部头XS 225是一个高分辨率的系统,可以配置在宏观的时装,各种扫描轨迹运行扫描。在我们的例子中,用于执行扫描仪使用的距离(源到对象的源到检测器),如表1中所述的三个扫描。在这个序列中的第一次扫描一个圆形轨迹上进行,而超过360度的角度范围内捕获2000突起。在此之后扫描系统配置的角度范围为720度(2圈),以收购2000螺旋轨迹的预测。最后,扫描仪的另一个螺旋扫描,收集超过360度(1圈)1000预测。对于过去两年的扫描,我们一共使用了螺旋间距为25.0毫米。如表2所示的另一次扫描已经添加到评价留在每一个第二凸起的第一扫描,导致四种不同的收购方案。 4个菜单的扫描参数总结于表2。
表2中。四种不同的设置定义的扫描和重建的几何形状的参数。
| Trajectory | Number of Projections | Angular Range [degree] | Pitch [mm] |
|---|---|---|---|
| Circular Helical Helical Circular | 2000 2000 1000 1000 | 360.0 720.0 360.0 360.0 | 0.0 12.5 25.0 0.0 |
| Volume size Voxel size | 512 512 512 35 µm | ||
1.2重建算法
的实部和从模拟预测内VGStudio MAX的体积数据集的重建中,我们使用512512512与采样距离为35微米的体素的体积大小。圆形扫描锥束滤波反投影重建FDK算法[1]。在此算法中的Shepp-洛根过滤器的过滤部分选择从真实的投影数据的窦腔X线照相-0.6063毫米的水平检测器偏移估计。没有任何探测器偏移处理的圆形和螺旋设置的模拟实验。
圆形表壳相比,收购的预测从螺旋扫描重建理论的精确滤波反投影算法对螺旋锥束Katsevich提出的[2]。我们的实现如下[10-14]中提出的。首先以恒定的方向沿着源轨迹的锥形束投影的衍生物,通过使用2点的差异[10]的计算。突起重新归类斜线使用双线性内插法在检测器上,其次是一个希尔伯特变换的由FFT实现的[12]。落后的内插数据重组的步骤之后到原来的探测器的倾斜突起的坐标[11]。最终的反投影步骤前面的滤波的投影数据的加权[13]根据[14]中提出的方法的锥束盖。最后,每一个突起背投影使用一个像素的驱动的方法,可以是在CPU上执行,或使用CUDA的GPU。
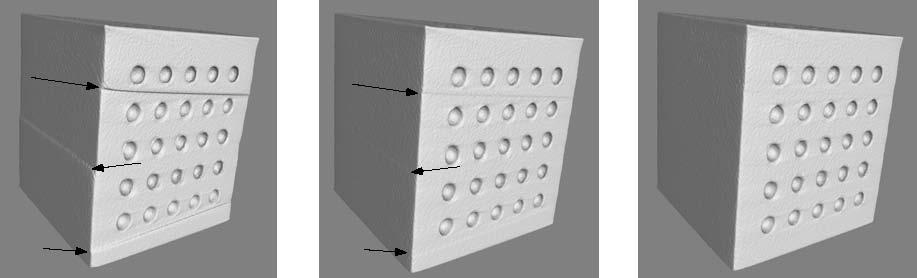
图1。比较不同的选择,从实际数据的螺旋重建过程中的水平检测器偏移。可以选择0.0毫米(左)和-0.6毫米的圆形表壳(中)介绍步骤文物重建体积。手动调整参数的检测器偏移-0.76毫米取得了最好的结果(右)。
类似的通函水平扫描检测器偏移的螺旋扫描来确定。虽然圆形和螺旋扫描仪的设置是一样的,所确定的探测器的偏移量是不相等的。螺旋案件的水平偏移必须手动调整,以产生合理的重建。图1示出的螺旋扫描(2000突起)重建的卷具有不同水平的检测器偏移的参数值。当设置参数为0.0毫米或FDK重建之通函(-0.6毫米)的值相同步骤发生在最终体积的文物(见左边和中间的图像,图1)。手动确定的水平检测器偏移值-0.76毫米取得了最好的结果在两个螺旋扫描。
1.3评价方法
对于所获得的数据的评价和比较的两个重建算法,我们开始看的灰度值和噪声特性计算重建成交量的信号 - 噪声比(SNR)信号的平均值μsigdivided的标准偏差背景σbg的。
在此之后,我们使用VGStudio最大测量不确定度决定的正确性重建。通过使用预定义的测量模板,包含所有的立方体和球形上限的功能,它可以应用相同的评价所有重建卷。正因为如此,下面的步骤被用来评估每个重构的数据集:
数据从圆形和螺旋轨迹数据的精确螺旋FBP的立方体使用锥束FDK重建。
带音量内部VGStudio MAX“先进的表面测定方法”已经计算的多维数据集定义的表面和使用登记功能的VGStudio MAX的。
然后我们合并到场景中预定义的测量模板和嵌合的体积和模板的手,从而使它们的边界大致一致。
通过复制和粘贴的测量模板的手动对齐卷参考对象(领域)的模板适合重建立方体球形上限。
为了提高我们注册的体积与模板对齐的体积的拟合的参考对象与进口计量模板的参考对象。
然后,我们删除了拟合测量的体积和重复步骤4,以提高拟合的参考对象(球体)。
最后,我们使用九个模板内的测量一些球体之间的实际长度的预定义的功能,重建的体积的分辨率调整。这些特性的标称长度计算从DKD校准证书。在迭代过程中的体积分辨率已得到纠正,这样的特点符合其标称值的实际长度。
所有这些步骤后,其参考对象的测量模板适合重构的多维数据集和模板被用来计算每个球冠的中心和表面的形式。然后,我们使用的球的位置来计算偏离其标称值的实际长度。此外,表面的形式,这是指由轮廓峰高Zp中的档案谷深度的总和ZV [15],由扫描的几何形状和所使用的重建算法引入量化失真量。
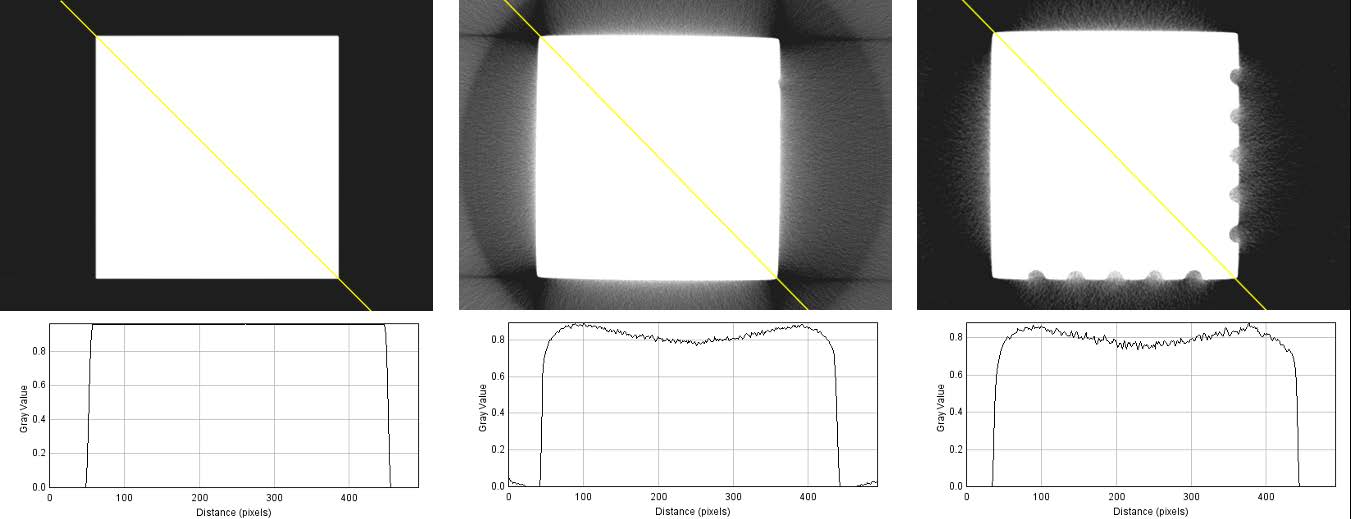
图3。重构的多维数据集的中心轴向片(窗口= 0.4,= 0.15)。左边的图像显示从模拟螺旋预测的重建。中间影像和右侧图像显示真实数据立方体重建。下面的配置文件切片显示型材沿着黄线片图像的灰度值。

图2。在重建的多维数据集的顶部的工件。在FDK重构的物(左)的锥束伪影的发生在顶部的多维数据集。当使用Katsevich的FBP算法是可见的锥束伪影(右)。
3。评估
3.1噪声统计和灰色价值
两个重建技术的噪声特性的比较发现,在我们的例子中Katsevich的FBP算法具有更好的图像质量与FDK算法对于噪声比(见表3)。与2000年的突起FDK该signal-to-noise比为约16.79只有一个较小的值,当突起的数量被减少到1000。在螺旋形的情况下的信号 - 噪声比为23.31 2000预测时使用,其中突起的数目减少时,可检测到少量增加的。
表3中。灰度值统计(意思是背景信号和标准偏差)和信号噪声比的真实数据集。
| Traj. | Proj. | µsig | σbg | SNR |
|---|---|---|---|---|
| Circ. Circ. | 1000 2000 | 0,8161 0,8312 | ±0,0490 ±0,0495 | 16,6716 16,7910 |
| Hel. Hel. | 1000 2000 | 0,7875 0,8075 | ±0,0335 ±0,0346 | 23,5189 23,3181 |
当考虑为圆形的FDK重建和使用Katsevich FBP算法重建的灰度值,可以看出,多维数据集的角落被欠真正的数据集,而在模拟数据集的多维数据集的角落显示有采样工件(参见图2)。由于上面的角落中的真实数据集上的圆弧和螺旋重建该落客的立方体的侧面出现稍微弯曲。此神器可能是由于散射效应,因为在从模拟数据集的重建,双方是完全平坦的。
另一个神器只发生在圆形FDK重建是如图3所示。在对象节目的顶部和底部的所谓的Feldkamp由于圆形扫描几何构件(参见图3)从侧面的多维数据集[4]。
3.1长度偏差
为了量化和比较准确的重建,并作出实际和名义所有球形帽彼此的距离之间的差异是真实和模拟数据集计算测量不确定度的报表。表4中显示了得到的球面上限为三种不同的组合的绝对差的平均值和标准偏差。在左边的列(“窗格”)所有75个球形帽之间的距离已经包括在计算。结果表明,在圆形重建的绝对长度偏差的平均值为9和10微米之间,什么是实际的体素大小为35微米的大约三分之一的。可以被看作是一个粗略的理论下限为圆形的情况下,从模拟预测的重建为10.4微米的长度偏差。寻找在此界限是符合FDK算法甚至更低的结果(9.1和9.0微米)的真实数据。与此相反,Katsevich螺旋FBP重建得到的长度偏差为高的情况下的真实数据。与此相反,约六分之一的体素的大小,模拟的螺旋突起的平均长度为5.7微米的偏差,甚至低于任何FDK重建。
表4中。的实际的标称距离,彼此之间的球形帽[μm]的差异。
表4示出的第二列25的球形帽趴在多维数据集的顶面的长度偏差。结果表明显著低于前一列的值(2.3~5.2微米),但圆形重建仍然优于螺旋数据集,只有一个例外:模拟螺旋数据上的测量结果显示最低平均值为2.3μm。
仅在第三列中的罩帽的顶部和其他两个边的上限之间的距离计算的长度的偏差。同一平面和两个侧面的上限之间的上限之间的长度已经从这些计算中排除。所有的扫描结果显示值稍高(11.4至17.9微米)时考虑所有球形上限之间的距离(第一列)。在比较前两列,从真实的数据与2000年预测的重建提供几乎相同的长度偏差螺旋(11.4微米和11.5微米的圆形表壳)。至于前两个列的理论下限(7.8微米)是由
图4。实际和名义的立方体球面上限之间的距离之间的偏差。所有通函(左)和螺旋(右)重建的长度偏差校准标称长度暗算。重建从2000年的实际预测,线性趋势线已经安装的数据集。
从模拟螺旋数据和重建没有达到任何真实的数据集。
长度之间的偏差和相应的标称长度的比较显示,使用FDK算法与2000和1000的突起为圆形重建可提供独立的标称长度几乎相同的结果。与此相反,在模拟数据集示出了在其长度偏差(参见图4的左图像)的正偏压。在两个螺旋重建与2000年和1000突起的长度偏差分布相当类似的,像在圆形的情况下(参见图5的右图像),但是从模拟预测的重建没有显示出在其长度的偏差的偏置,并具有一个较小的范围(-20~20微米)作为从模拟循环数据的重建。
3.2形状偏差
另外的长度偏差,实际和名义表面形成球形帽(ZPZV)之间的差异已计算平均超过所有平面及以上每一个单一平面(表5)。的真实数据集的平均形状偏差列于表4的范围从10.1微米(大约三分之一的体素的大小)在2000年的突起的圆形扫描螺旋扫描中的21.5微米。从螺旋轨迹的圆形轨迹的形式因素比较显示的圆形的情况下,测量的是2更准确的一个因素。从模拟预测的重建计算出的表面形状偏差总是低于真实数据集的。当比较单一平面的立方体,无飞机显示了大的偏差,从表面形式的整体平均(第一列)。
表5中。和实际值之间的标称表面形式的球形帽[μm]的差异。
| Traj. | Data | Proj. | All planes | Plane 1 | Plane 2 | Plane 3 |
|---|---|---|---|---|---|---|
| µ σ | µ σ | µ Σ | µ σ | |||
| Circ. | Real | 1000 | 12.2 ±5.8 | 11.5 ±5.9 | 11.8 ±5.1 | 13.5 ±6.3 |
| Circ. | Real | 2000 | 10.6 ±5.4 | 10.1 ±4.9 | 10.6 ±4.9 | 11.2 ±6.4 |
| Circ. | Sim. | 2000 | 7.7 ±6.1 | 7.8 ±7.9 | 9.8 ±3.7 | 5.6 ±5.2 |
| Hel. | Real | 1000 | 17.3 ±7.9 | 14.0 ±8.0 | 19.7 ±6.4 | 18.4 ±8.1 |
| Hel. | Real | 2000 | 18.3 ±7.7 | 13.4 ±7.5 | 20.0 ±6.9 | 21.5 ±6.4 |
| Hel. | Sim. | 2000 | 9.7 ±6.6 | 12.8 ±8.3 | 10.4 ±3.7 | 6.0 ±5.2 |
4。讨论和结论
本文展示的评价,一方面从真正的圆形突起的重建交付更好的结果,即使在测量的不确定性(长度偏差和形状偏差)的多维数据集的螺旋重建没有显示在上部和下部的锥束伪影飞机。另一方面,看着重建模拟实验Katsevich螺旋FBP算法的结果相比,所有其他数据集的最小长度偏差。这一事实表明,有真实和模拟预测的处理,并有潜在的真实数据集的优化的螺旋重建算法之间的间隙。
例如,较低的信号噪声比圆形表壳可以解释的旋转轴方向的空间分辨率损失[6]由于未完成的绥 - 史密斯充分条件[16]引入的Feldkamp文物和提高背景噪声(见表3)。 Katsevich算法虽然具有较低的检测器利用,在只谭丹尼森窗口内的数据用于重建多维数据集,它显示了一个较高的信号噪声比。检测器利用率的增加,使用了一种技术,将来自检测器的冗余数据到一个确切的螺旋重建[17,18],不仅会增加的signal-to-noise比为螺旋形的情况下,甚至进一步,但也可能影响到准确性正的测量。
考虑长度和形状偏差必须牢记,圆形重建,我们能够提取的探测器偏离正弦,而在螺旋数据集,我们确定手动。一个事实,即,包括所有螺旋重建Katsevich算法,在轴向方向上的额外的转变取决于此结合表明,较大数目的参数影响的重建,从而提供更多的空间用于测量误差。在我们的例子中,当精细调谐参数的检测器偏移螺距的长度和形状偏差,我们得到了不同的结果。
综上所述,即使Kasevich的算法显示模拟数据的最佳结果,我们的研究证明,在真实数据的情况下的影响力和几何参数的不确定性做一个CT扫描仪的精确校准必要增加螺旋并购重组的准确性。
参考文献
[1] L.费尔德坎普,L.戴维斯,J.克雷斯,“实用锥形束算法”,àJOSA,第一卷。 1,1984年6月。 612-619。
[2] Katsevich,“理论精确滤波反投影型反转算法,螺旋CT,”SIAM应用数学杂志“,第二卷。 62,2002年,页。 2012年至2026年。
[3] A. Katsevich,“一种改进的精确滤波反投影算法的螺旋CT,”应用数学进展,第一卷。 32月。 2004年,第681-697。
[4] JF巴雷特和N.杰的,“文物CT:识别和避免”,“放射影像学”(RadioGraphics),第二卷。 24日,2004年,第。 1679。
[5的] T.舍恩,I. Bauscher,T.福克斯,U.哈斯勒,J.希勒,S. Kasperl,“Dimensionelles MIT MESSEN螺旋Computertomographie,”2009年,第1-2页。
[6] J.希勒,S. Kasperl,T.舍恩,S.Schröpfer,D.魏斯,“三维计算机断层扫描与圆弧和螺旋采样,”2010年ndt.net,通过尺寸测量的探测误差比较,第1-7页。
[7 B.凯克] Weinlich,H. Scherl M. Kowarschik,和J. Hornegger的,“比较高速的GPU使用CUDA和OpenGL的光线投射,”高性能和硬件感知计算,KIT科学出版社,2008年,第25。
[8]兆瓦德波尔,A.GröplJ. HESSER,和R.方式的“减少量呈现高阶整合文物”,IEEE Visualization'97最新热门话题,1997年,第。 1-4。
[9] W. Kahan的“Pracniques:进一步减少截断误差言论,”通信ACM,第一卷。 8日,1965。 40。
[10] H. Yu和G.王,螺旋锥束CT的Katsevich算法的实施研究“,”中国X射线科学与技术,2005。 12日,2004。 97-116。
[11] F.三明治,海鲜,素食主义者,J.包,D. Heuscher,“精确螺旋重建使用本机的锥束几何形状,物理医学和生物学卷。 48,2003,页。 3787。
[12] A.德奇“Katsevich锥束CT,”2006年的反演公式。
[13] G.燕,J.田,朱S. C.秦,戴华,杨楼,吴平,“快速Katsevich算法在GPU上的螺旋锥束CT,”信息技术在生物医学领域中,IEEE交易,卷。 14日,2010年,第。 1053年至1061年。
[14] J.扬,问:香港,和T.周的“锥束覆盖方法:一种方法执行反投影Katsevichs螺旋锥束CT的精确算法,”X射线科学杂志,2004年,第1-19。
[15] G.T.史密斯,工业计量,2002年,斯普林格。
[16] H.K.的绥,“一个反演公式锥束重建,”SIAM杂志应用数学卷。 43,1983年,第546-552。
[17] A. Katsevich“3PI的算法螺旋电脑断层扫描,”应用数学进展,第一卷。 2006年3月,36页。 213-250。
[18] H.Schöndube,K. Stierstorfer,F.三明治,海鲜,素食主义者,“精确的螺旋锥束CT重建的冗余数据,”在医学和生物学中的物理学,第一卷。 54,2009年,页。 4625。
TAG:
