

根据无损检测标准的医疗CT图像引导手术的精度研究
根据无损检测标准的医疗CT图像引导手术的精度研究
摘要
对于一个几年中,新的,革命性的手术方法,如图像引导手术,被称为并成功地应用于人类医学中为特定的干预措施。今天,从多学科的研究人员正在努力扩展这些做法,使精度高,微创手术的在颅面积,提供了一个显着减少创伤病人因轻微的开口(1-3钻孔),以及新的治疗和药物传递的形式。然而,替代传统和完善的程序是唯一可能被排除在外,一个陈述的整体利益和个别病人的风险可以得到有效的微创介入之前,如果意外伤害的重要结构。医学三维成像技术,如X射线计算机断层扫描(CT)图像引导手术的基础和病人的解剖,用于导航任务,在规划的各个阶段和过程控制提供必要的信息。因此,质量要求不再地址只有一个CT系统(如对比度,噪音小,清晰度等)的不确定性,但也显示RESP的成像质量。测量的精确的尺寸与位置相关的解剖结构。这一点标志着医学成像模式的转变。为了评估的能力不同的CT三维测量系统的任何建议,标准或准则存在于医疗领域,到现在为止。虽然有一个一致的精度特性的需要,特别是当新的断层像C-臂CT概念相反,常规的和高分辨率的螺旋的CT中应考虑。能满足这种需要,已知坐标测量技术,已成立,并已被证明在工业CT应用领域的应用方法。在这里,主要的挑战是适应医疗用途的情况下,建议的过程和所使用的测试样品。本文提出了在第一步骤中的结果的精确度研究根据VDI / VDE GMA 2630对比工业锥束CT系统用于医疗螺旋CT指引。
关键词:精度研究,计算机断层扫描,螺旋CT,三维测量
1引言
在人类医学的上下文中的术语“图像引导手术”被用于外科手术的方法的。使用的三维图像数据的干预几乎预先计划和analogically执行的[12]。对于在颅领域的微创手术操作计划目的不仅是一个普通的可行性研究,但在定义的轨迹,使目标区域无碰撞的方法的手术器械。在这里,它是非常重要的,附近的结构(血管,神经,器官等)仍然安然无恙。为了坚持计划的路径,通常的做法是使用光电跟踪系统。在干预过程中检测到的姿势和方向的移动所使用的工具,并显示给外科医生[12发生偏差; 4]。这些手术器械的处理,通过机械系统的约束和指导,从全手动的方法不同而有所差异的部分自动化机械手é。克。远程操纵或手术机器人[3]。近期的研究和发展工作主要的目的是在增加的精度,因此现有技术中的病人的安全。高导航精度分别低的不确定性,它的具体病人的解剖充分描述所施加的成像技术是非常重要的。高视觉质量(对比度,锐度,信号噪声)的生成的成像数据是不是唯一的严格要求。更重要的是,所有相关的数据结构描述的没错,我。 E。最好的不确定性,对他们的尺寸和位置。对于一个测量系统,如CT在工业应用中,这是一个公知的需求[1; 8; 11],但在人类医学成像的解剖对象的上下文中,它是真正的新。所以,这个词在这里的含义是关于SI单位长度的测量不确定度相当陌生,这将导致在三维测量任务的医疗成像技术的普遍适用性评估准则,标准和最佳实践的程序,以及缺乏用于声明一个任务相关的测量不确定度。由于成像技术的大量使用一致的精度特性是很重要的。只有他们能够导致一个公正的比较的第一个估计的测量误差可以预期的。为了对付特定的VDI / VDE GMA 2630第1.3 [9]的坐标测量技术对原产于医疗用途的情况下,提出行之有效的方针指引的转让和应用的不足之处。在这方面的贡献,其余的图像制导subcranial手术干预作为第一个步骤一个具体的例子说明。这个例子在医疗螺旋CT系统的精度研究的基础上设计和实施。
2挑战 - 微创手术的风险量化basicranium
图像制导和内视镜手术,微创手术技术的一个分支。对于腹部和下肢被广泛应用于(如腹腔镜,athroscopy等),代表一个很好的替代传统的,探索性的做法。最小化的创伤更小的压力和更快的康复的病人微创手术的主要优点。操作工具,如夹持器,光线和相机的来源中插入组织节约的方式通过在皮肤上的小伤口,并达到相应的操作只需按预留部分软组织领域。没有广泛的开口感染是不太可能的。尽管提出了更高的努力,所需要的设备,微创手术的发明被评为相比具有成本效益的探索方法,为病人的住院天数少,并能更快重新融入到他们的社会和工作生活[5]。应用限制,尽快达到骨性结构。在这里,它是必要的几乎计划和执行与所需的工具,以达到所述目标区域的多个孔。相比的规划路径的位置的偏差,如插入错误不能被校正,要么抑制达到会合点的孔或导致重要的结构损伤。尤其是subcranial的操作是复杂的干预,到现在为止,不能被执行最小侵入性由于紧相邻的血管,神经,内耳和大脑。巨大的治疗潜力潜水员的基础上的国际研究小组把他们的努力在解决这个问题[6 2 10 7]。操纵在内耳或耳蜗,耳蜗植入物或活组织切片检查,而不需要为岩骨开口是可能的应用[5]。图1示出了所描述的虚拟规划的多角度的轨迹,基于一个诊断,治疗前的薄片CT岩骨和岩骨内的结果,可能操纵在basicranium孔。根据最近的调查,从计划的轨迹中的2-3毫米偏差是可以接受的上述[5]中描述的应用程序。
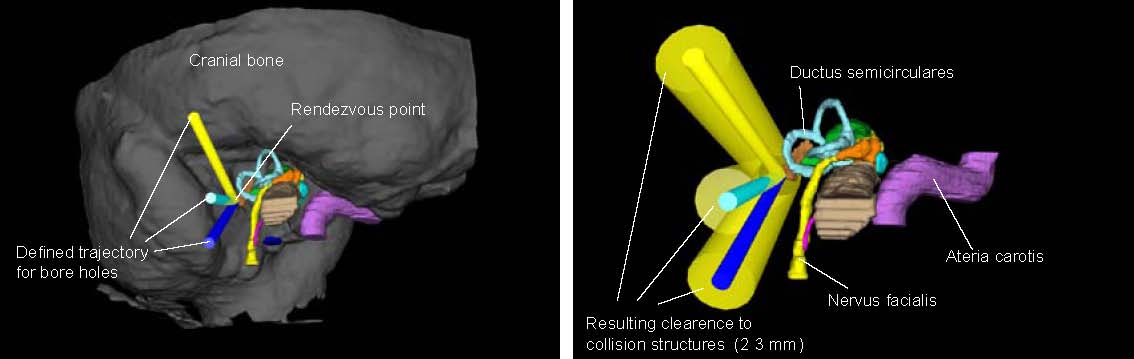
图1:虚拟的微创介入规划的basicranium
尽管人类医学的上下文中,在手术过程中链的不确定性有系统的测定(成像,检测,操纵器,周围的环境的影响)上的孔插入的准确性,其影响在这个非常狭窄的公差域是很少检查。一个新的微创手术技术,同时实现依赖于一个可靠的语句,分别可预期的成功,病人之前实际干预的风险。今天,这几乎是不可能的。缺少精确知识的不确定性捐助者和为他们分配的计算模型。图2给出了第一种方法的术前个别病人的风险评估。这是直接依赖于剩余的间隙,间隙不确定性的比例分别为定义的轨迹。理想化的情况下,这仅受限于所选择的轨迹和患者的解剖结构有一间隙。在现实中,该间隙是由内部和外部约束的限制。可用间隙所造成的不确定性,这是一个直接结果的缺陷和简化的成像和分割过程中的重要结构的确切位置和尺寸的外部限制。相反的内限制是由于偏离理想轨迹和特征的手术过程中的能力(插入孔)。在这两种情况下的初始游隙是大大减少的和未知的,导致患者的风险较高。
理想化的情况,真实的情况
轨道
颅骨颅骨轨迹
缸径管轴=
缸径运河轴≠轨迹的
轨迹清除率降低
最大。间隙限制(操作)
限制(影像)
重要结构(神经,血管等)的重要结构(模糊的可视化)
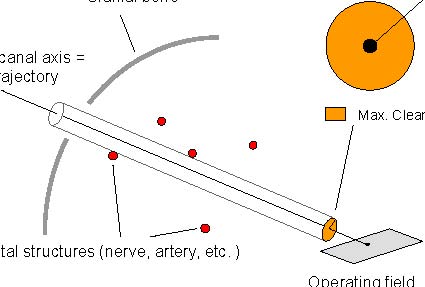
图2:简单的方法来量化病人的危险
从这个角度来看,它不确定度的摄像以及操纵变得明显,必须加以评估,在先进的,并施加到个别病人的解剖。这强调的X射线计算机断层扫描的作用,作为一个标准的技术在医疗成像变化。视觉方面是不再在前景中,所生成的体积数据是相当的基地,在三维空间的高精密的导航任务。因此,这里的CT用于作为一个坐标测量装置,将被处理这样的工业应用相媲美。
3方法 - 医疗CT系统的精度研究
根据VDI / VDE GMA 2630第1.3的精度研究的实施不等于给出一个具体的测量任务,测量不确定度的一份声明中。基于所计算出的特性,它可以被测试,而不是检查的测定装置是否工作在按照制造商的说明书,通常是适合于给定的任务。此外,计算出的特点是一个公正的比较不同的系统之间,属于同一类型或不同的系统概念的推动者。准确度的研究是对微创手术的风险评估,因此第一个重要步骤。这是由于的新tomographical概念如C-臂CT和高分辨率螺旋CT系统,其潜力并没有减少测量的不确定性定量成像的解剖结构的特殊的重要性。
3.1定义的特征
根据VDI / VDE GMA 2630第1.3的精度研究的基础上,实现计算的几个特点,可以分为以下组的探测误差长度测量误差材料和几何形状相关的特性
根据使用的CT系统(锥束CT,扇形束CT或螺旋CT)之间的术语“将被区分的图像”或“测量图像中的”测量传感器的概念。这里被视察CT系统使用一个平板或一个多行的光电二极管阵列检测器结合的螺旋重构算法。对于这两种情况下的重构体未结合的部分数据从离散的测量。因此,通过定义计算出的特性是指在图像中的术语“”,将被标记为与指数(TS)的。此外,这项研究的主要论点集中的特点,相关的特征尺寸,忽视与形状偏差的处理。作出这一决定的原因之一是医疗CT系统(这里是:分体素大小0.6毫米),但这并不能满足空调的形式测量的需求,并会产生误导的不良结果的分辨率有限。因此,最后的研究范围减少,并设置为以下几个特点:探测误差的大小PS(TS)长度测量误差E(TS)材料和几何形状相关的特性GS(TS)
规格PS(TS),E(TS)和GS(TS)的精确计算下的版权法律组成的社团性质的德国工程师(VDI)EV,杜塞尔多夫,可以找到相应的指引。 [9]
3.2试样
为了进行准确度的研究,已设计,制造和校准的官方DKD实验室的一组试样(2步缸,7双滚珠杆)。试样的规格的图3中可以发现。的双球棒(长度和球直径)的尺寸相关的潜在的医疗CT系统的测量体积。双球酒吧允许的特性PS(TS)和E(TS)的计算。
规格
材料骨相当于号步骤5高度(总)直径80 mm(最大)100毫米
材质球的合成鲁宾材料酒吧碳纤维直径球5/8/10 mm长度(中心至中心)30/45/60/90/120毫米
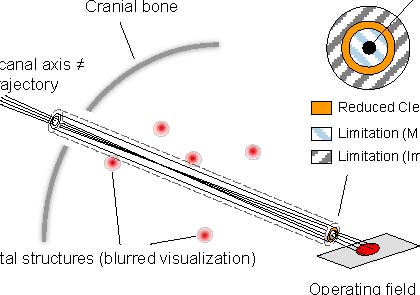
图3:使用的测试样品的规格
的步骤气缸用于审查的影响的工件材料和工件的几何形状上的测量过程(特性GS(TS))。该指引建议选择典型的材料,这也是真正的测量任务的一部分。为了尊重的医疗领域中的CT扫描的条件,骨等效材料用于高密度和低密度的步骤气缸,该特性在很宽的范围内的辐射衰减系数类似的解剖模型(患者) 。典型的辐射长度在颅区域的尺寸的步骤气缸对应。
3.3实施
在两个不同的CT系统的精度研究实施。的医疗CT系统是一个标准的螺旋CT,它是用于在医疗例程包括的各种任务。在图像引导手术领域的应用。作为参考的研究也被进行了在工业上的锥形束CT与平板探测器。所使用的参数设置用于图像采集和重建所定义的初步测试的装置,并可以在图4中找到。它有提及的是,所施加的参数被自由选择,不一定适合于给定的例子中第2章。根据该指引的CT系统内的测量体积的试验片的位置和朝向,在三个阶段在0°和90°(参见图4)之间变化。 RESP的放大倍率。产生的体素大小是所有的时间设置到最大为0.6毫米。此外,重复三次被施加到整个测试时间表,以便考虑随机事件。卷数据的分析是通过使用该软件VG Studio Max的2.1(音量图形,海德堡)。一个普通的点网格,以及为圆形的通道,每个通道具有超过500个测量点,用最小二乘法来确定所测得的试验片的球和气缸直径为组合应用。
参数集
曝光时间500毫秒卷积内核B 30F X射线管电压120千伏X射线管电流0.450毫安体素的大小(各向同性)0.600毫米
号预测1200曝光时间800毫秒卷积核的Shepp洛根X射线管电压200千伏X射线管电流0.300毫安体素的大小(各向同性)0.200毫米
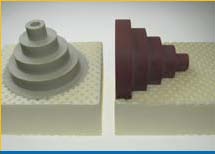
图4:参数集视察CT系统
3.4演示结果
计算的特性PS(TS),E(TS)和GS(TS)的结果显示在下面的图表和表格。由于双球酒吧已被用于评估的长度测量误差E(TS),将得到的值的事实,必须纠正由PS(TS)的数量,在以平均化效果毕业系统的探测误差补偿。此外,它有要提到的是,PS(TS)中,E(TS)和GS(TS)总是定位上的最大的测量偏差的结果。他们不导致从一个平均或滤波处理。它指出的试验片的取向是一个至关重要的影响因素。在这两种情况下所取得的结果主要由一个敏感的方向(45°医疗CT系统和工业CT系统的90°),这导致先前观察到的测量偏差的乘法。
| PS(TS, 3 mm) [mm] | PS(TS, 8 mm) [mm] | PS(TS, 10 mm) [mm] | |
|---|---|---|---|
| Medical CT | -0.018 | -0.039 | -0.022 |
| Industrial CT | 0.016 | 0.037 | 0.037 |
表1:用于探测误差的大小
探测尺寸误差(表1)可以看出,小球直径轻微的测量偏差的结果,虽然在这两种情况下是没有任何联系的球的尺寸和探测尺寸误差明显。此外,值得注意的是,所观察到的探测尺寸误差的绝对是用于医疗和工业CT系统在同一范围内。这是没有预料到,由于存在的差距,有关的硬件的概念和取得的体素大小。关于探测的尺寸误差的符号的差异可能被解释为不同的重建算法的使用,和过滤器,这直接影响到灰度值的档案等表面提取的阈值驱动。长度的测量误差的分析(图5)与此相反,显示出明确的差异之间的医疗和工业CT系统。虽然这两个测试系列遵循的趋势,与更高的长度测量的测量误差的增加,绝对的范围是在平均高五倍的医疗CT系统为工业。然而,随着最大。长度测量误差的0.270毫米医疗CT的结果是半体素的大小和范围内所涉及的各方比预期的要好得多。
表2示出的材料和几何形状的依赖特性GS(TS)的结果。展望在医疗CT系统,最大的偏差发生的步骤气缸的两个最小外径,独立的材料。对剩余的直径的值的范围内计算出的长度的测量误差。对于工业CT系统测试系列显示更大的直径越来越大的测量误差。此外,值得注意的是,高密度工序缸产生始终保持较高的偏差比低密度步进缸。
| GS(TS, 10 mm) [mm] | GS(TS, 20 mm)[mm] | GS(TS, 40 mm)[mm] | GS(TS, 60 mm)[mm] | GS(TS, 80 mm) [mm] | GS(TS, 100 mm)[mm] | |
|---|---|---|---|---|---|---|
| Feature | Inner ∅ | Outer ∅ | ||||
| Medical CT (low density) | 0,088 | 0.205 | -0.197 | -0.133 | 0.138 | 0.167 |
| Medical CT (high density) | 0.137 | -0.197 | -0,180 | 0.120 | 0.144 | 0.176 |
| Industrial CT (low densitiy) | 0.022 | -0.034 | 0.047 | 0.046 | 0.072 | 0.095 |
| Industrial CT (high densitiy) | -0.075 | 0.095 | 0.095 | 0.086 | 0.099 | 0.160 |
表2:材料和几何形状相关的特性GS(TS)
4总结与展望
这方面的贡献的主要目标是建立在医学领域公认的标准,它允许提供的医疗成像技术,如CT测量不确定度的有效报表。这将有助于量化的创新,高精密的外科手术的可行性和风险。出于这个原因,建议范围的应用领域从生产计量领域,到医疗成像系统和用例已经存在的标准和准则。在第一步骤中,它已被证明VDI / VDE GMA 2630指引执行寻找在医疗CT系统是可能的,通过使用适合的试样。因此,它可以比较不同类型的CT系统中用于进行尺寸测量的关于其普遍适用性。作为单精度特性的评估是不足够的量化个别病人的风险,这是必要的,以确定和应用的任务相关的测量的不确定性。这需要服从真正的病人中的辐射,以及在解剖的方式相似的规则的新的方法和新的试验片。
致谢
作者要感谢德国研究基金会(DFG)1585:的“MUKNO多端口Knochenchirurgie上午Beispiel得Otobasis支持这方面的贡献研究单位的工作范围内。 PD医学博士的也特别感谢。菲利普·布鲁纳的诊断与介入放射学系的大学医院亚琛,阿希姆·绍尔和朱迪思Pollmanns。
参考文献
M. BARTSCHER,U. Hilpert,D.菲德勒,Ermittlung得Messunsicherheit冯Computertomographie Messungen上午Beispiel eines Zylinderkopfs测定测量不确定度的计算机断层扫描测量使用了汽缸盖为例,[1]:TM-Technisches信使,卷。 75,3,页178-186,2008。
[2] M. Caversaccio等,:导航和Robotik河畔Otobasis,在:HNO卷。 57,10,页975-982,2009。
[3 H.菲舍尔,U.博赫斯,,Medizinische机器人系统,在Kramme,R.(Hrsg.),,Medizintechnik的,柏林,海德堡,斯普林格柏林海德堡,页853-862,2007。
[4] NM海明等,基于X射线锥束CT引导的干预措施的预测,在医学物理卷的自动图像世界的登记。 ,5,36页,1800年,2009年。
[5] Stenin我,汉森小号菲尔德J;贝克尔中号,KlenznerŤ,席佩尔Ĵ,Virtuelle Planung冯multiangulärenBohrkanälen河畔Otobasis,网址:http://www.egms.de/static/en/journals/cpo/的2012-8/cpo000662.shtml展位:2012年6月10日。
[6] LB Kratchman等。,走向自动化的图像引导Microstereotactic框架:经皮人工耳蜗植入术,骨连接并联机器人:松冈,Y.;达兰特 - 怀特,HF;尼拉,J.(Hrsg.) ,机器人,剑桥,麻省,麻省理工学院出版社,2011。
JH贵族等。人工耳蜗的访问占钻定位误差,自动确定最佳的线性钻孔轨迹,在国际杂志的医疗机器人与计算机辅助外科手术,第[7]。 6,3,页281-290,2010。
[8] R.施密特B.达姆C. Niggemann,,工业公司Computertomografie Messunsicherheitsbestimmung献给模具anhand kalibrierter Bauteile,在:TM-Technisches的信使卷。 78,3,页133-141,2011。
[9] VDI / VDE协会的会所和自动化技术(GMA),VDI / VDE 2630 1-3,Genauigkeit冯KoordinatenmessgerätenKenngrößen和德仁,中心Leitfaden楚适用车型冯DIN EN ISO 10360献给Koordinatenmessgeräte麻省理工学院的CT-Sensoren月2009
[10] G.想做等人,经皮进入岩尖在体外用定制的微立体定向帧图像引导手术技术的基础上,在:文献任Laryngologica,页,1-6,2009。
[] A. Weckenmann P.克莱默,预先确定的测量不确定度在应用程序的计算机断层扫描,在佐丹奴,M.;马修,L.(Hrsg.),,产品生命周期管理,伦敦,霍博肯,新泽西州,ISTE 11; Wiley出版社,页317-330,2010。
[12] G.维德曼,图像引导手术和医疗机器人技术在颅地区,在生物医学成像和干预杂志,第。 3,1,2007年。
TAG:
